Motion Planning for Multiple Autonomous Vehicles
Can't afford a driver while feel lazy to drive yourself? Have one, but fed up of the daily excuses and bad driving? Your holiday could have been too exciting but wasted worrying about the road, traffic and parking rather than the scenic stuff? Too scared to drive at those rapid highways? Find travelling too sleepy to be driving carefully?
Well autonomous vehicles are coming to your rescue. This series gives you an insight into the technology and what all you could expect in the future. See for yourself if these vehicles can be smarter than you to quarrel with your competitors on road, navigate the most unmaintained and poorly structured roads and drive the hard Indian way!
Chapter 2: Literature Review
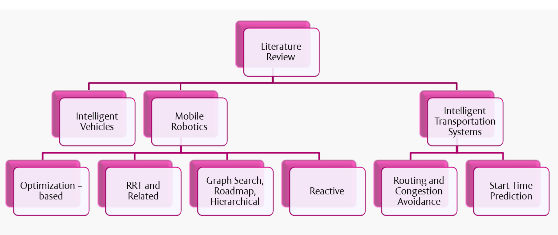
Trajectory Planning Current Intelligent Vehicles algorithms cannot be used as they are:
Current Mobile Robotics algorithms cannot be used as they are not applicable for:
|
Intelligent Management of the Transportation System Key sub-problems:
Key modelling differences from the literature
|
Video Presentation |
Powerpoint Presentation |
Chapters 3-6 : Trajectory Generation

Key Contributions
- Various aspects of unorganized traffic (operating without lanes) are studied.
- The problem of trajectory planning for unorganized traffic in a diverse multi-vehicle scenario is studied, while the literature is largely focussed on the study of the organized counterpart.
- The algorithm framework is generalized to the cases in which traffic intermingles on both sides of a dual carriageway (or the vehicles partly occupy the wrong side) for higher traffic efficiency (usually implying overtaking).
- A new coordinate axis system called the road coordinate axis system is designed for enhanced performance with curved and variable width roads.
Enter Part I - With Communication
Enter Part II - Without Communication

Chapters 7-8 : Intelligent Management of the Transportation System

Key Contributions
- The study is based upon the notion of diversities, which may be speed based diversity or task based diversity.
- Both recurrent and non-recurrent traffic is studied to overcome congestion avoidance which means applicability to any region depending upon its dynamics.
- The different models studied vary from being mostly semi-autonomous to mostly non semi-autonomous, which covers all the stages of the evolution of traffic.
- Different traffic elements including traffic lights, lane changes and routing are incorporated in the study.